Status, algorithmic approaches and experimental results”, Nikos Piperigkos, Ph.D. candidate, CEID. – Τμήμα Μηχανικών Η/Υ και Πληροφορικής
Σας ενημερώνουμε για τις παρακάτω ομιλίες (double bill!) που θα δοθούν στα πλαίσια της σειράς εκδηλώσεων “Σεμινάριο CEID & Social Hour” και των ΔΠΜΣ ΥΔΑ, ΣΜΗΝ και ΟΣΥΛ.
CEID Seminar & Social Hour: 1) “Optimization-based Models for Explainable Deep Learning Architectures in Multidimensional Signal Processing Applications”, Dr. Alexandros Gkillas, CEID. 2) “Towards collaborative autonomous driving: Status, algorithmic approaches and experimental results”, Dr. Nikos Piperigkos, CEID.
Titles: 1) “Optimization-based Models for Explainable Deep Learning Architectures in Multidimensional Signal Processing Applications”, 2) “Towards collaborative autonomous driving: Status, algorithmic approaches and experimental results”.
Speakers: 1) Alexandros Gkillas. 2) Nikos Piperigkos.
Date – location: Friday, Nov. 8, 3-5pm, CEID, lecture room E2.
Abstracts:
-
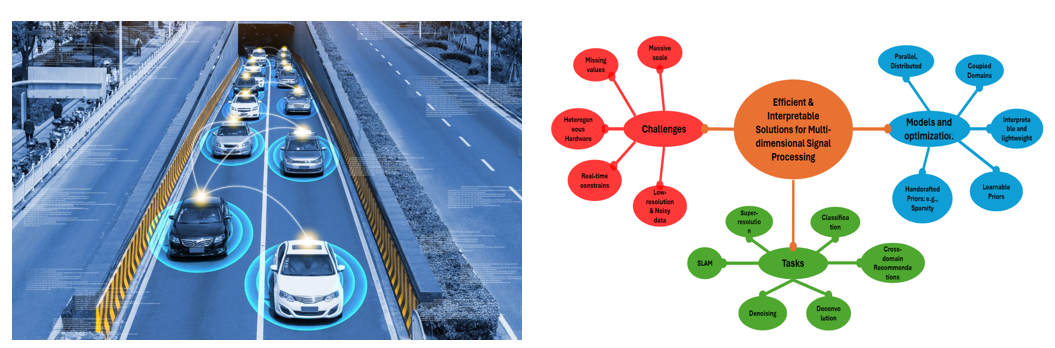
Multidimensional signals are found in many important fields, including remote sensing, precision agriculture, autonomous robotic systems, and complex recommendation systems. These signals often represent rich and structured information about physical phenomena, environmental conditions, or user behaviors. To address challenges in processing and analyzing these signals, we introduce a framework based on three layers of dependencies. The first layer considers data-level dependencies within the multidimensional signals themselves. The second layer examines domain-level dependencies among the areas where these signals originate or are applied. The third layer focuses on agent-level dependencies between a network of agents processing such signals and share a common goal. Modeling these interconnected layers of dependencies can provide critical insights and enhance performance in tasks such as LiDAR super-resolution, hyperspectral denoising and deconvolution, ultimately improving the accuracy and efficiency of multidimensional signal processing across diverse applications. In recent years, deep learning-based solutions have become common for processing multidimensional signals. However, these approaches seem to have reached a performance ceiling, with deeper architectures being proposed by trial and error, lacking clear mathematical justification, and requiring increasingly larger datasets for training. This talk argues that by utilizing optimization theory, we can more effectively leverage these three layer-dependencies, resulting in solutions that are both explainable and efficient. Overall, by bridging the gap between robust optimization techniques and modern deep learning, this direction advances the state-of-the-art in complex signal processing tasks and lays a foundation for future innovations in multidimensional signal processing.
-
Localization of mobile agents, as an indispensable and distinctive part of situational awareness, has emerged as highly significant task, in Intelligent Transportation Systems (ITS), Internet of Things, Robotics, Wireless Sensor Networks, etc. Major applications such as navigation, surveillance, exploration and mapping of unknown environments require positioning information, even with cm level of accuracy. Especially in ITS, the localization module is a key part of autonomous driving architecture, between perception and path planning layers. At the same time, 5G and Vehicle-to-Vehicle (V2V) communications facilitate the close collaboration of autonomous vehicles, transforming them to a swarm of Connected and Autonomous Vehicles (CAVs) which tackles the automotive challenges in a collective manner. In this talk, emphasis will be given on describing the status of novel autonomous driving technologies that are currently employed in real-world applications. Moreover, the concept of collaborative autonomous driving realized by operating CAVs will be discussed. Finally, innovative algorithmic solutions and experimental results will be provided, focusing mainly on assessing the location awareness in swarms of vehicles and demonstrating the overall applicability of autonomous driving technology.
About the speakers:
Alexandros Gkillas holds a Diploma in Electrical and Computer Engineering and completed both his MSc in Signal & Image Processing Systems and PhD in Computer Engineering and Informatics at the University of Patras. Since July 2021, he has been a member of the Industrial Systems Institute at Athena Research Center. In June 2023, Alexandros began working as a Computer Vision Engineer at AVISense.AI a spin-off of Athena RC and UPAT, and in September 2024, he started as a Postdoc Researcher at the Industrial Systems Institute. He has contributed to several Horizon EU and national projects, advancing AI and computer vision technologies. His broader scientific interests include signal and image processing, optimization theory, explainable AI and deep learning.
Nikos Piperigkos received Diploma, MSc and PhD degrees from Computer Engineering and Informatics Department of University of Patras (UPAT), Greece in 2018, 2020 and 2024. He joined the Industrial Systems Institute, Athena Research Center (RC) and became member of Multimedia Information Processing Group in 2019. Since 2023, he is employed as Signal Processing Engineer in AVISense.AI, a spin-off of Athena RC and UPAT, focused on enabling extended perception capabilities to autonomous vehicles. He has been involved as research engineer in four Horizon EU R&D projects since 2019 (CARAMEL, CPSoSAware, Trustee and Autotrust). His research interests mainly lie on the intersection between signal processing and autonomous vehicles, including cooperative localization and tracking, sensor fusion, SLAM, adaptive distributed estimation, and deep learning algorithms.